Currency
|
12.0V / 1.6Nm / 106rpm / Coreless / Metal Gear / TTL
This product applies metal ball bearings to the XC430 series instead of plastic bushing. This change improves the durability of vertical loads on the axis of rotation. Other specifications are the same as the existing XC430 series.
1. Various Operating Modes
(Velocity Control, Position Control, Extended Position Control, PWM Control)
2. Profile Control for Smooth Motion Planning
3. Hollow Back Case Minimizes Cable Stress (3-way-routing)
4. Easy and Simple Assembly Structure
5. Energy Saving with Reduced Current
6. Increase vertical load durability by using metal ball bearings

| XC430-T150BB-T | 1 |
|---|---|
| HN11-N101 (Assembled) | 1 |
| Robot Cable-X3P 180mm | 1 |
| Bolt M2.6x5 TAP | 5 |
| Bolt M2x5 | 5 |
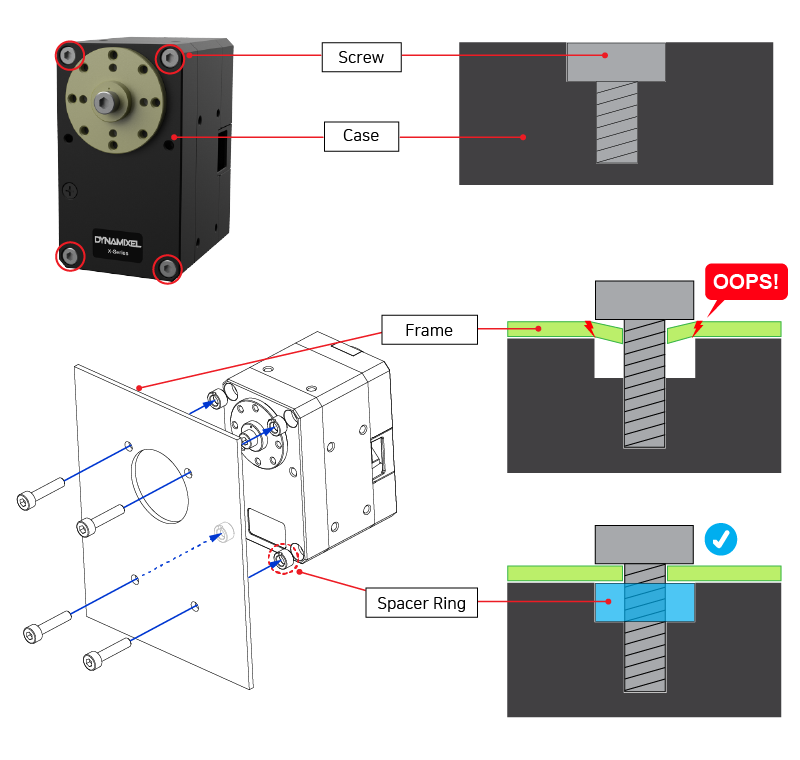
| Spacer | 5 |
Not included Idler Set (HN11-i101 Set)


DYNAMIXEL-X Series cable assembly through hollow case
Organize the entangled cable before assembling the back case.
Do not assemble the back case with entangled cable. The entangled cable can be squashed by the case and cause communication error.
If you use two cables through the hollow case, the cables will be damaged.
Use only one cable through the hollow case.
The DYNAMIXEL-X Series adopted a new gold-plated JST connector for secure and reliable communication.
The connector used for previous Dynamixel is Molex.
To control DYNAMIXEL-X Series actuators via OpenCM or USB2Dynamixel, please use the JST-Molex Convertible Cable enclosed in the package.
However, the Molex-JST convertible cable is NOT included in the XL430 model.
Please purchase a convertible cable when using a controller and interface that supports the JST connector.

| Manufacturer | Robotis |
|---|


