Currency
|
Physical Al
OpenSource Platform
Research Friendly Solution

Providing convenient data collection processes using the Physical Al Tool.
Reducing model training preparation time through quick and easy data management.
Supporting model training and inference examples to help machine learning and inference processes.
Delivering perfect compatibility with ROS2 and open-source support.
Offering various packages and simulators (e.g., Movelt 2, Gazebo).
Realizing handy integration with a wide range of robot platforms and sensors.
Affordable entry point for beginning Physical Al research.
Flexible expandability based on the diverse DYNAMIXEL lineup.
Reliable research platform with outstanding durability and maintenance service.
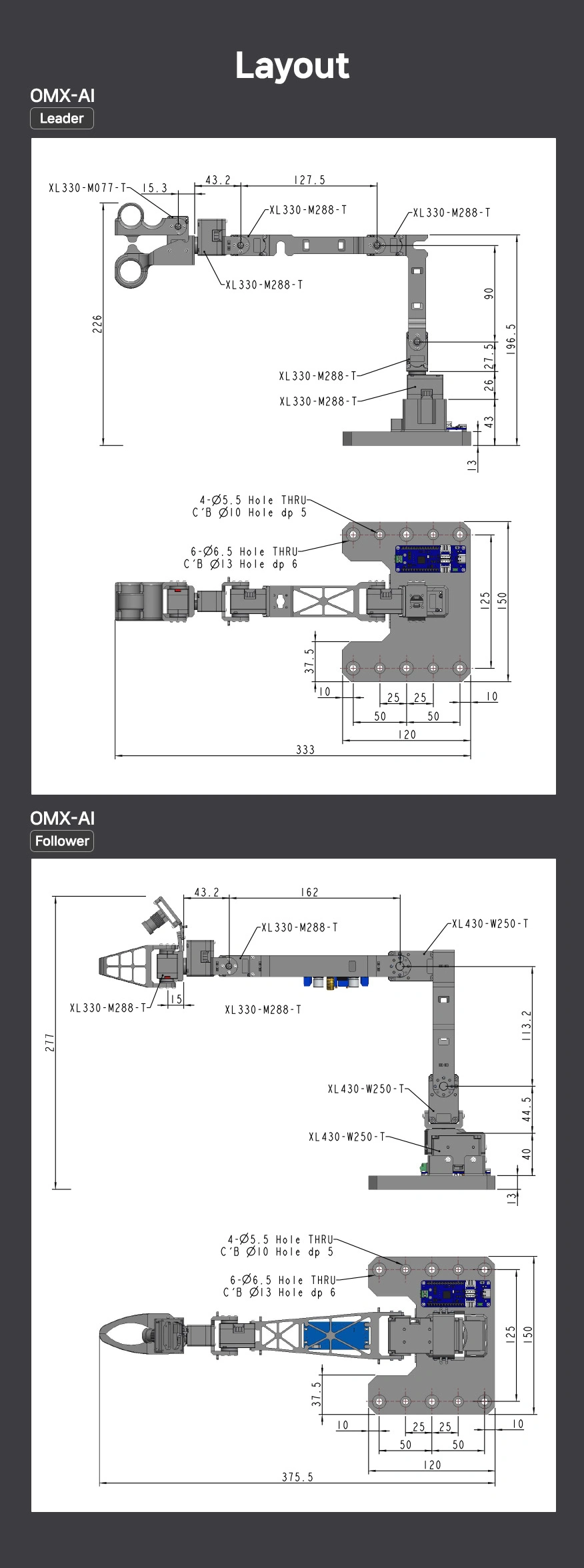
| Items | OMX-AI (Leader) | OMX-AI (Follower) |
| DOF | 5 + 1 Gripper | 5 + 1 Gripper |
| Reach | 335 [mm] | 400 [mm] |
| Weight | 360 [g] | 560 [g] |
| Operating Voltage | 5 [VDC] | 12 [VDC] |
| Joint Resolution | -π(rad) ~ π(rad), -2,048 ~ 2,048 [pulse/rev] | -π(rad) ~ π(rad), -2,048 ~ 2,048 [pulse/rev] |
| Joint Range |
|
|
| DYNAMIXEL-Y Specification |
|
|
| Host Interface | USB C-Type | USB C-Type |
| Internal Communications | TTL | TTL |
| Communication Baudrate | 1 [Mbps] | 1 [Mbps] |
| SW | ROS 2 | ROS 2 |

| Manufacturer | Robotis |
|---|

