Currency
|
Convenience
OpenSource Platform

Minimize operator fatigue through gravity and friction compensation, and spring effect features.
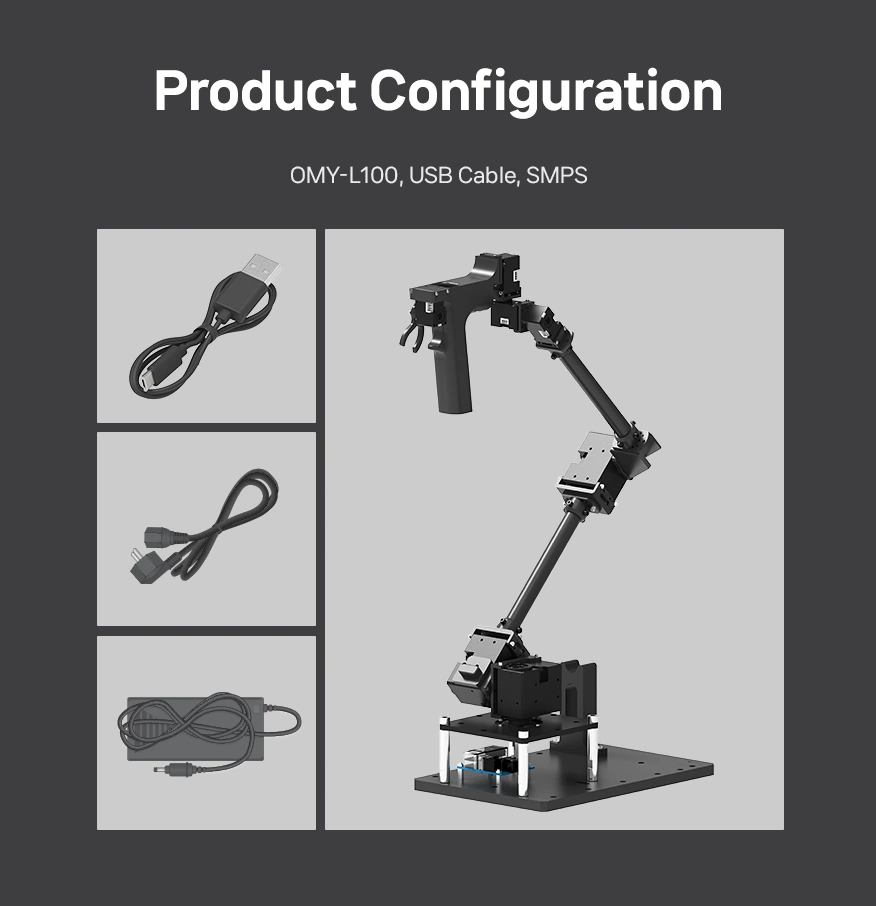
Offering operational and customization flexibility via a lightweight (under 1.5kg) and modular structure.
Delivering perfect compatibility with ROS2 and open-source support.
Offering various packages and simulators (e.g., Movelt 2, Gazebo, MuJoCo).
Enabling compatibility between heterogeneous/multiple robots based on the ROS2 environment.
| Items | OMY-L100 (Leader) |
| DOF | 7 |
| Payload | - |
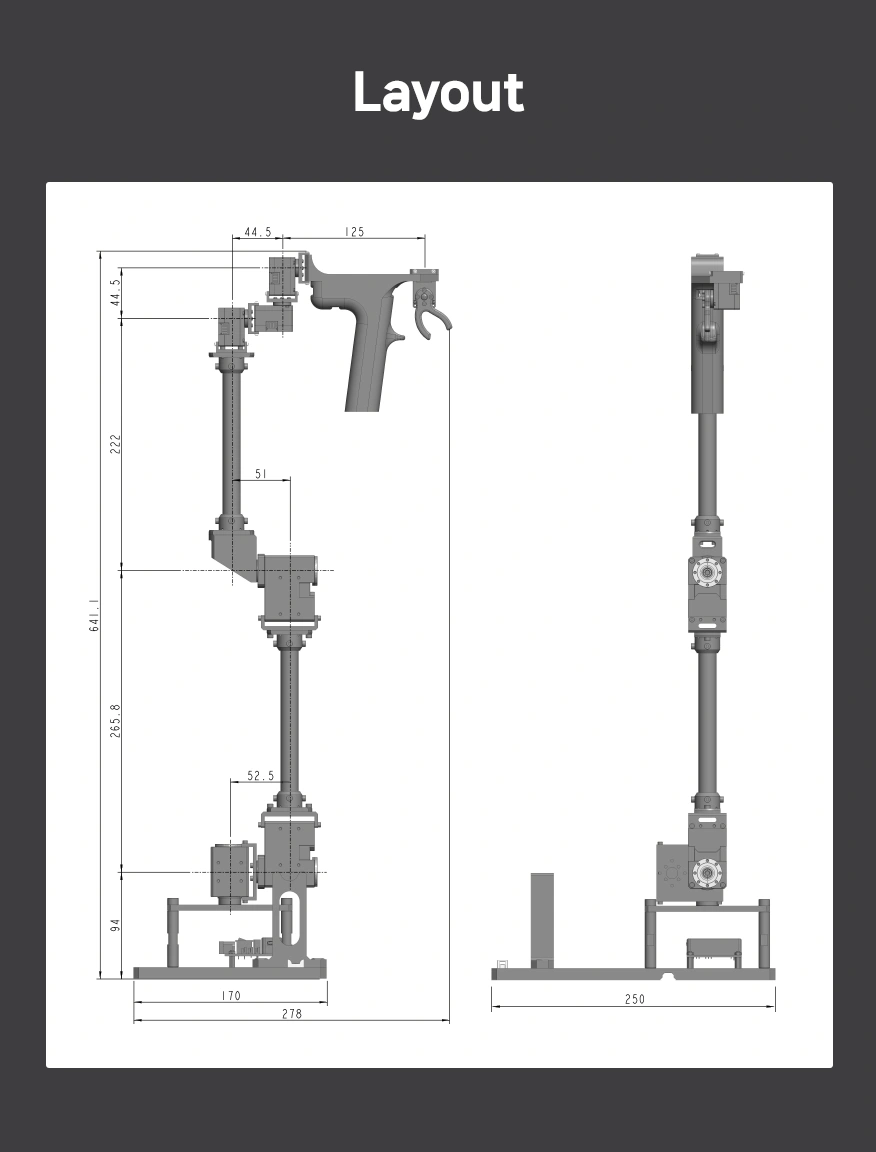
| Reach | 560 [mm] |
| Weight | 1.46 [kg] |
| Operating Voltage | 12 [VDC] |
| Joint Resolution | -π(rad) ~ π(rad), -2,048 ~ 2,048 [pulse/rev] |
| Joint Range |
|
| DYNAMIXEL-Y Specification |
|
| Repeatability | - |
| Brake Force | - |
| TCP Speed | - |
| Host Interface | U2D2 (USB 2.0) |
| Internal Communications | TTL Multidrop Bus |
| Communication Baudrate | 4 [Mbps] |
| Robot Hand | - |
| Camera | - |
| Manufacturer | Robotis |
|---|

