Currency
|
Physical Al
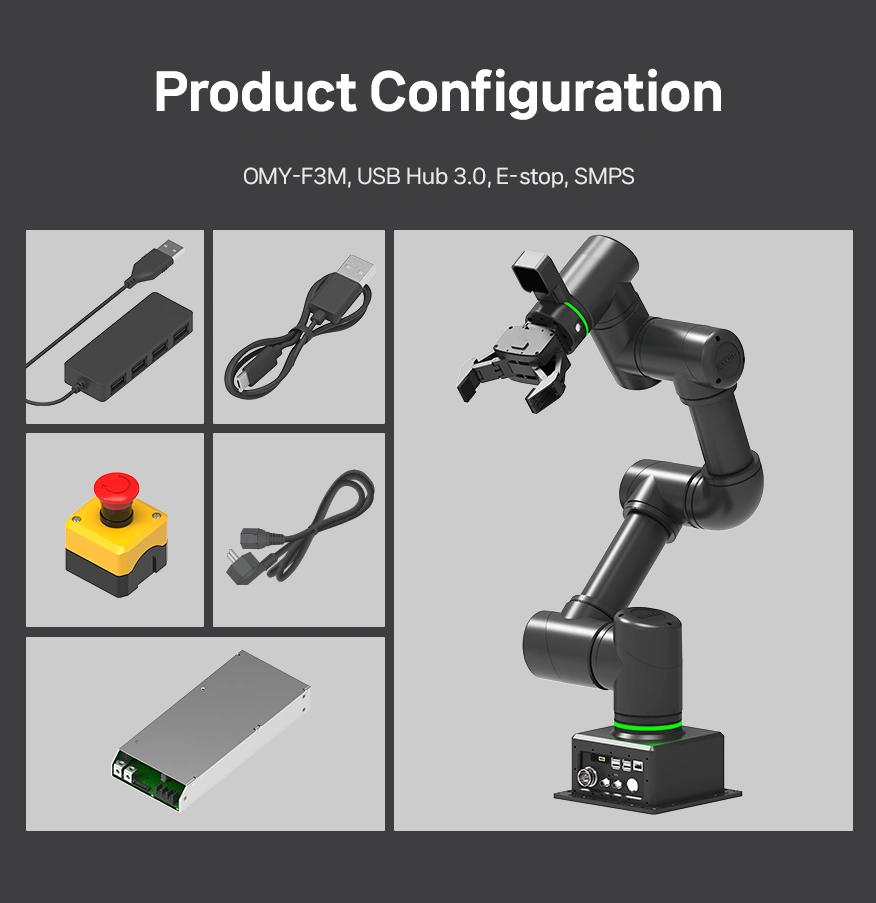
Plug-and-Play
OpenSource Platform

Providing convenient data collection processes using the Physical Al Tool.
Reducing model training preparation time through quick and easy data management.
Supporting model training and inference examples to help machine learning and inference processes.
Minimizing research preparation time by providing hardware with integrated vision and grippers.
Realizing a perfect benchtop manipulator through a minimal footprint and lightweight design.
Providing a robot control environment via an integrated controller (SBC) without the need for a separate PC.
Delivering perfect compatibility with ROS2 and open-source support.
Offering various packages and simulators (e.g., Movelt 2, Gazebo).
Supporting development convenience through a dedicated OMY Control GUI.
| Items | OMY-F3M (Follower) |
| DOF | 6 |
| Payload | 3 [kg] |
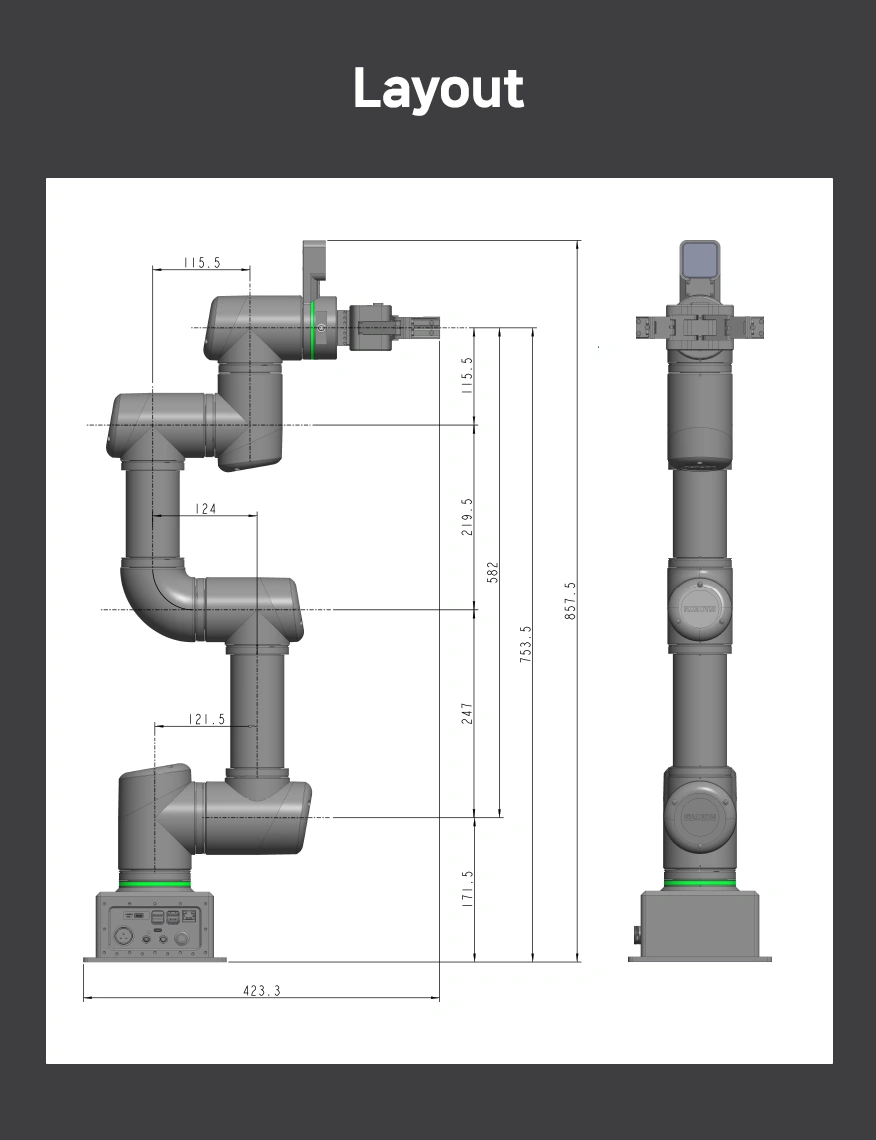
| Reach | 580 [mm] |
| Weight | 13.5 [kg] |
| Operating Voltage | 24 [VDC] |
| Joint Resolution | -π(rad) ~ π(rad), -262,144 ~ 262,144 [pulse/rev] |
| Joint Range |
|
| DYNAMIXEL-Y Specification |
|
| Repeatability | ±0.05 [mm] |
| Brake Force | 200% of the continuous torque for each joint |
| TCP Speed | <900 [mm/s] |
| Host Interface | Ethernet |
| Internal Communications | RS485 |
| Communication Baudrate | 4 [Mbps] |
| Robot Hand | RH-P12-RN |
| Camera | Intel RealSense D405 |
| Manufacturer | Robotis |
|---|

