Currency
|
Physical Al
Convenience
OpenSource Platform
Providing convenient data collection processes using the Physical Al Tool.
Reducing model training preparation time through quick and easy data management.
Supporting model training and inference examples to help machine learning and inference processes.
Minimize operator fatigue through gravity and friction compensation, and spring effect features.
Adopting built-in collision avoidance feature to Prevent operator injury and robot damage through.
Delivering smooth acceleration and deceleration during operation with the time-based trajectory profile function.
Delivering perfect compatibility with ROS2 and open-source support.
Offering various packages and simulators (e.g., Movelt 2, Gazebo).
Supporting development convenience through a dedicated OMY Control GUI.

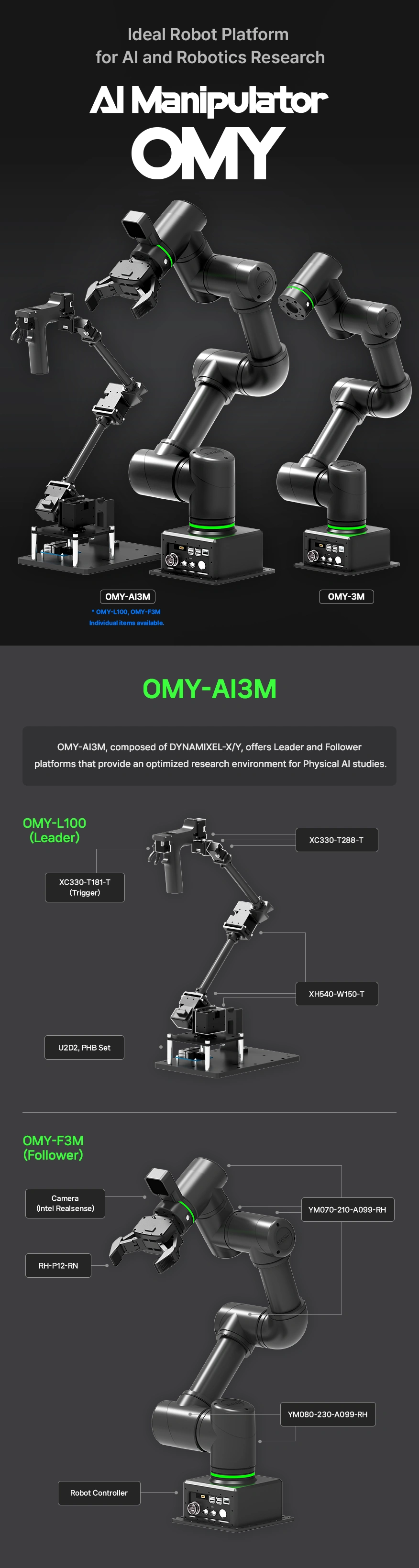
| Items | OMY-L100 (Leader) | OMY-F3M (Follower) |
| DOF | 7 | 6 |
| Payload | - | 3 [kg] |
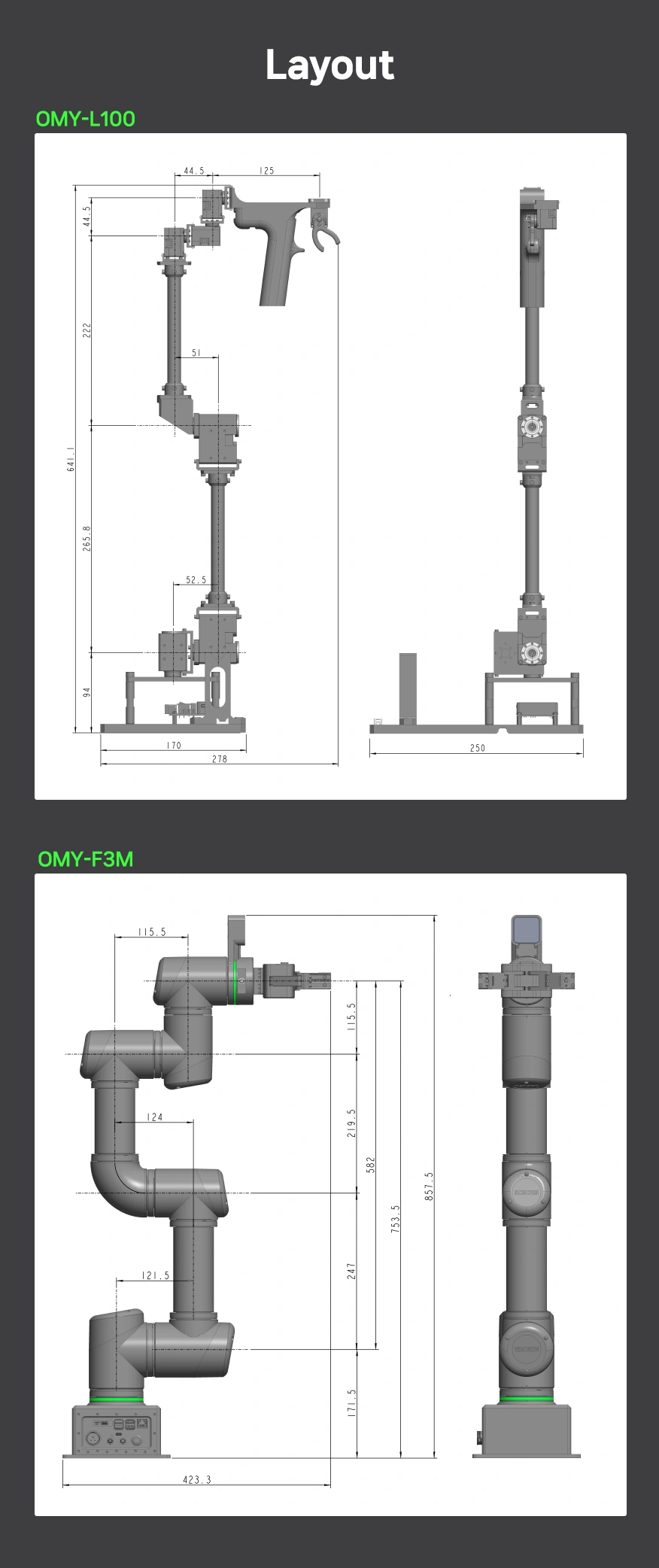
| Reach | 560 [mm] | 580 [mm] |
| Weight | 1.46 [kg] | 13.5 [kg] |
| Operating Voltage | 12 [VDC] | 24 [VDC] |
| Joint Resolution | -π(rad) ~ π(rad), -2,048 ~ 2,048 [pulse/rev] | -π(rad) ~ π(rad), -262,144 ~ 262,144 [pulse/rev] |
| Joint Range |
|
|
| DYNAMIXEL-Y Specification |
|
|
| Repeatability | - | ±0.05 [mm] |
| Brake Force | - | 200% of the continuous torque for each joint |
| TCP Speed | - | <900 [mm/s] |
| Host Interface | U2D2 (USB 2.0) | Ethernet |
| Internal Communications | TTL Multidrop Bus | RS485 |
| Communication Baudrate | 4 [Mbps] | 4 [Mbps] |
| Robot Hand | - | RH-P12-RN |
| Camera | - | Intel RealSense D405 |
| Manufacturer | Robotis |
|---|

