Currency
|
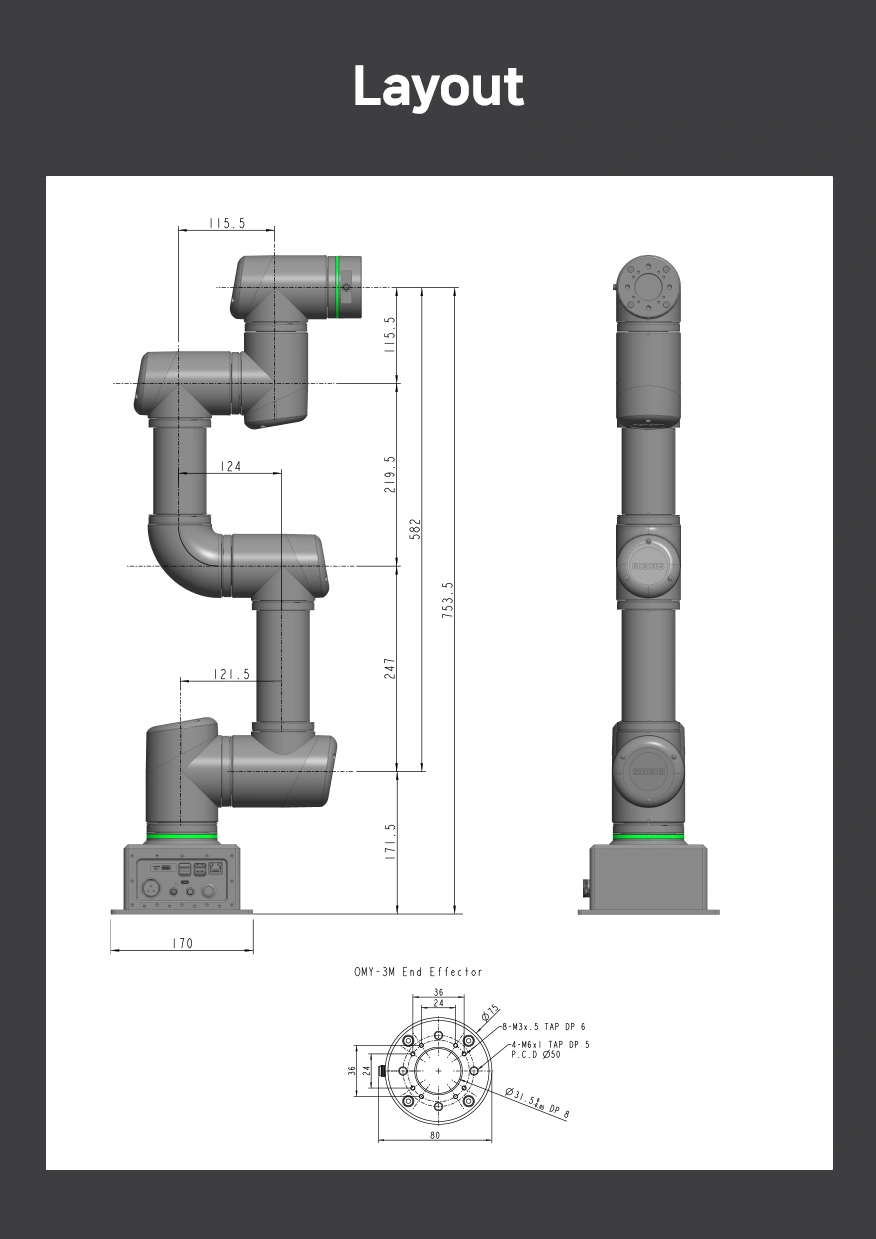
Custom Manipulator
Plug-and-Play

Easy integration of 3rd-party components (such as hands, sensors, vision systems) depending on the working environment.
Providing customizable development environment (C, C#, Python, etc.) via the DYNAMIXEL SDK.
Realizing a perfect benchtop manipulator through a minimal footprint and lightweight design.
Providing a robot control environment via an integrated controller (SBC) without the need for a separate PC.
Delivering perfect compatibility with ROS2 and open-source support.
Offering various packages and simulators (e.g., Movelt 2, Gazebo).
Supporting development convenience through a dedicated OMY Control GUI.

| Items | OMY-3M |
| DOF | 6 |
| Reach | 580 [mm] |
| Weight | 13.5 [kg] |
| Operating Voltage | 24 [VDC] |
| Joint Resolution | -π(rad) ~ π(rad), -262,144 ~ 262,144 [pulse/rev] |
| Joint Range |
|
| DYNAMIXEL-Y Specification |
|
| Repeatability | ±0.05 [mm] |
| Brake Force | 200% of the continuous torque for each joint |
| TCP Speed | <900 [mm/s] |
| Host Interface | Ethernet |
| Internal Communications | RS485 |
| Communication Baudrate | 4 [Mbps] |
| Robot Hand | - |
| Camera | - |
| Manufacturer | Robotis |
|---|

