Currency
|
■ Description
This base plate made of aluminum is used to fix the ROBOTIS Manipulator-H to a table.
Use a clamp or the holes on the plate to fix onto the plate. [Clamp not included]
■ Package Contents
|
Description |
Qty |
Weight |
|
|
Frame |
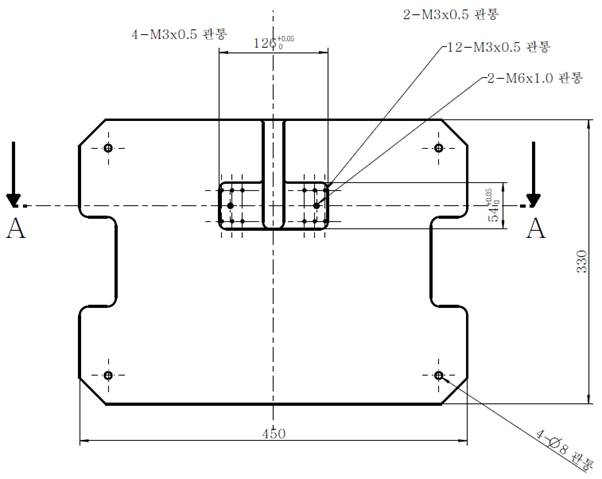
Base Plate (450mm x 330mm) |
1 |
2.15 kgs |
|
Frame |
Angle |
2 |
30g/ea |
|
Screw |
Wrench Bolt(WB M3*8) |
30 |
- |
1. Fix the L-shaped angle with the bolt to the Manipulator joint #1.

2. The photo on the left is the external wiring for the arm. Label #1 shows a pair of 4P cables and power connector; these connect to joint #1 as shown on the right picture.
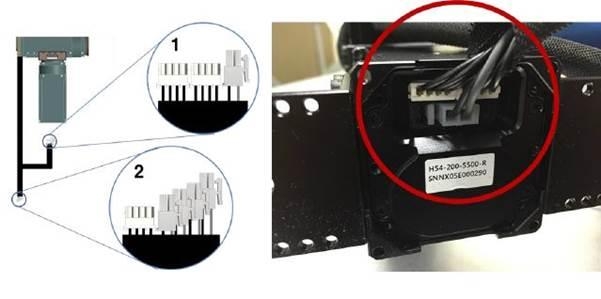
3. Once the connections are complete, fix the arm to the base plate as shown on the photo below.

4. Label #2 shows a 4P connector and 4 power connectors and these connect to the power expansion hub and the 4P cable connects to the extension.
5. Connect the USB2Dynamixel to the hub with the 4P cable; connect another port of the 4P hub to the extension.

Multi-purpose, low-cost manipulator
6 DOF (built with Dynamixel Pro)
Modular structure for easy maintenance
Lightweight design for easy placement and mobility.
Endures payload suitable for small to mid scale operations.
Wide operation range
Suitable for repetitive and high precision operation
USB interface, RS-485 communication
Provides SDK for user programming
(provides examples of forward / inverse kinematics, profile control)
| Manufacturer | Robotis |
|---|