Currency
|
The NEW waterproof Servos are here!
DYNAMIXEL XW Series - Waterproof Servo - IP68
The DYNAMIXEL X-Series is a line-up of high-performance networked actuators. Improved Torque, Compact Design, Enhanced Durability, and Expandability.
| Model: | XW540-T260-R |
| Weight : | 185g |
| Torque : | 9.5 N·m [Stall torque] |
| Speed : | 40 rpm [No load speed] |
| Dimensions: | 33.5 X 58.5 X 44 (WⅹHⅹD) [mm] |
| Motor: | Coreless |
| IP68 | (1m, 24hr) |
For more detailed information, please visit the Product Information page.

| Item | Specifications |
|---|---|
| MCU | ARM CORTEX-M3 (72 [MHz], 32Bit) |
| Position Sensor | Contactless absolute encoder (12Bit, 360 [°]) Maker : ams(www.ams.com), Part No : AS5045 |
| Motor | Coreless(Maxon) |
| Baud Rate | 9,600 [bps] ~ 4.5 [Mbps] |
| Control Algorithm | PID control |
| Resolution | 4096 [pulse/rev] |
| Backlash | 15 [arcmin] (0.25 [°]) |
| Operating Modes | Current Control Mode Velcoity Control Mode Position Control Mode (0 ~ 360 [°]) Extended Position Control Mode (Multi-turn) Current-based Position Control Mode PWM Control Mode (Voltage Control Mode) |
| Weight | 185 g |
| Dimensions (W x H x D) | 33.5 x 58.5 x 45.9 mm |
| Gear Ratio | 260.6 : 1 |
| Stall Torque | 8.8 [N.m] (at 11.1 [V], 4.5 [A]) 9.5 [N.m] (at 12.0 [V], 4.9 [A]) 11.2 [N.m] (at 14.8 [V], 5.9 [A]) |
| No Load Speed | 37 [rev/min] (at 11.1 [V]) 40 [rev/min] (at 12.0 [V]) 48 [rev/min] (at 14.8 [V]) |
| Radial Load | 40 [N] (10 [mm] away from the horn) |
| Axial Load | 20 [N] |
| Operating Temperature | -5 ~ +80 [°C] |
| Ingress Protection rating | IP 68 |
| Input Voltage | 10.0 ~ 14.8 [V] (Recommended : 12.0 [V]) |
| Command Signal | Digital Packet |
| Protocol Type | RS485 Asynchronous Serial Communication (8bit, 1stop, No Parity) |
| Physical Connection | RS485 Multidrop Bus |
| ID | 253 ID (0 ~ 252) |
| Feedback | Position, Velocity, Current, Realtime tick, Trajectory, Temperature, Input Voltage, etc |
| Part Material | Full Metal Gear / Full Metal Case |
| Standby Current | 40 [mA] |
|
XW540-T260 -R |
1 |
|---|---|
| HN13-N105 | 1 |
| Robot Cable-WP 1000mm | 1 |
| Robot Cable-WP 1000mm(Extension) | 1 |
| Wrench Bolt WB M2.5x5 | 16 |
| Wrench Bolt WB M2.5x4 | 10 |
| Wrench Bolt WB M3x10 | 1 |
ID : 1
Baud Rate : 57600bps
(User can change various settings including ID and baud rate according to environment)
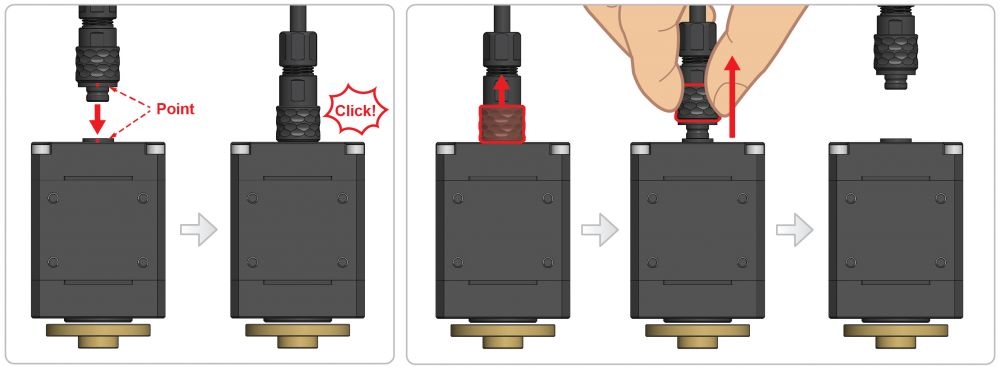
The OpenCR controller has a JST connector for direct connection, but since the OpenCM9.04 + OpenCM 485 expansion board only has a Molex connector, a conversion cable must be used by utilizing U2D2 PHB.


| Manufacturer | Robotis |
|---|


{kind=link}